Prove con la gestione realtime dei GPIO della Raspberry Pi
Di seguito alcune prove che ho effettuato salvando solo i due file:
e scrivendo di volta in volta il pezzetto di codice d'esempio in un file chiamato prova.py. Per lanciarlo:
sudo python prova.py
Prova base su una linea GPIO
Invia dieci impulsi da un secondo usando la libreria rpgpio. Qui il realtime non c'entra ancora nulla.
from rpgpio import GPIO
import time
pin = 21
g= GPIO()
for i in range(10):
g.init(pin, GPIO.MODE_OUTPUT)
g.set(pin)
print("set " + str(g.read(pin)))
time.sleep(1)
g.clear(pin)
print("clear " + str(g.read(pin)))
time.sleep(1)
Il sorgente della classe GPIO() è qui:
Test di allocazione di memoria
Alloca memoria, ci scrive sopra e controlla e rilegge cosa ha scritto. Anche qui il realtime non c'entra ancora nulla :-).
from rpgpio_private import *
cma = CMAPhysicalMemory(1*1024*1024)
print(str(cma.get_size() / 1024 / 1024) + "MB of memory allocated at "
+ hex(cma.get_phys_address()))
a = cma.read_int(0)
print("was " + hex(a))
cma.write_int(0, 0x12345678)
a = cma.read_int(0)
assert a == 0x12345678, "Memory isn't written or read correctly"
print("now " + hex(a))
del cma
Il sorgente della funzione CMAPhysicalMemory() è qui:
Invio impulsi via DMA
Primo esempio per generare impulsi. Genera impulsi da 2 uS sul pin GPIO21.
Sembra che la risoluzione minima sia 2 uS, se provo a mettere 1uS non scende al di sotto dei 2 uS.
from rpgpio import DMAGPIO,GPIO
import sys
pin = 21
g=GPIO()
g.init(pin, GPIO.MODE_OUTPUT)
dg = DMAGPIO()
dg.add_pulse(1 << pin, 2)
dg.add_delay(2)
dg.run(True)
print("dmagpio is started")
try:
print("press enter to stop...")
sys.stdin.readline()
except KeyboardInterrupt:
pass
dg.stop()
g.clear(pin)
print("dma stopped")
Il sorgente della classe DMAGPIO() è qui:
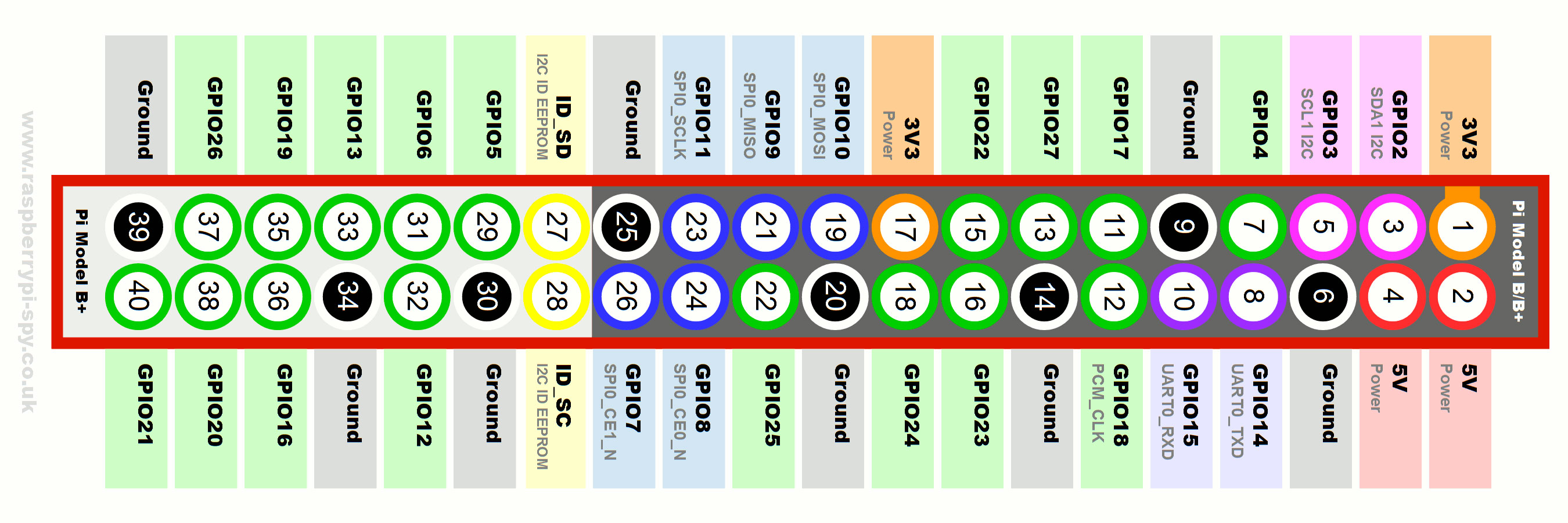
Pinout della Raspberry Pi
Links
- Sorgenti del progetto PyCNC
- Commenti su PyCNC sul forum Raspberry
- Video
- MagiDeal 42/57/86 TB6600 Stepper motor controller
- Driver a Mosfet
- Toshiba TB67S249FTG
- Articolo sulla tecnologia usata https://community.arm.com/soc/b/blog/posts/bcd---the-most-interesting-process-technology-you-haven-t-heard-of
- GCode simulator
- Soluzioni CNC
- Soluzioni print 3D
- Gestalt and the Modular Machines that Make
- NanoDLP Software di slicing su RaspBerry per stampanti 3D a resina
- Componenti Meccanici
- Datasheet componenti Elettronici
Altri link
Soluzioni basate su Arduino
- Alligator
- Smoothieboards
- Replicape Rev B
- Ramps Controllo di potenza basato su Arduino
- GRBL firmware
- Marlin firmware
Host vari per GRBL esempio bCNC
- OctoPrint
- TMC2100
- Raspberry Pi Alamode CNC Controller
- Raspberry Pi CNC
{kind=link}
Fondatore di Area SX srl, Acme Systems srl e del TanzoLab, si occupa dal 1974 di elettronica digitale, dal 1978 di microprocessori, dal 1992 di microcontroller, dal 1995 di Linux e pubblicazioni su Web, dal 2005 di progettazione, produzione e commercializzazione di schede Linux Embedded.
http://www.tanzilli.com - http://www.acmesystems.it - https://github.com/tanzilli - sergio@tanzilli.com